概要
われわれの研究グループでは、小型圧力源を内蔵した液圧駆動方式の「マイクロハイドローリックアクチュエータ」を提案している。柔軟材料であるPDMS(polydimethylsiloxane)で作製されたシート状アクチュエータの内部に微小な流路構造を作り込み、その流路内に加わる圧力を、内蔵圧力源で制御することでアクチュエータを変形させるのが、マイクロハイドローリックアクチュエータである。本研究では、その動作メカニズムを明らかにし、より機能的な動作を実現する形状や機構を設計するため、コンピュータシミュレーションでその変形や動きを再現し、解析しようと試みている。
 構造解析シミュレーションの結果
構造解析シミュレーションの結果
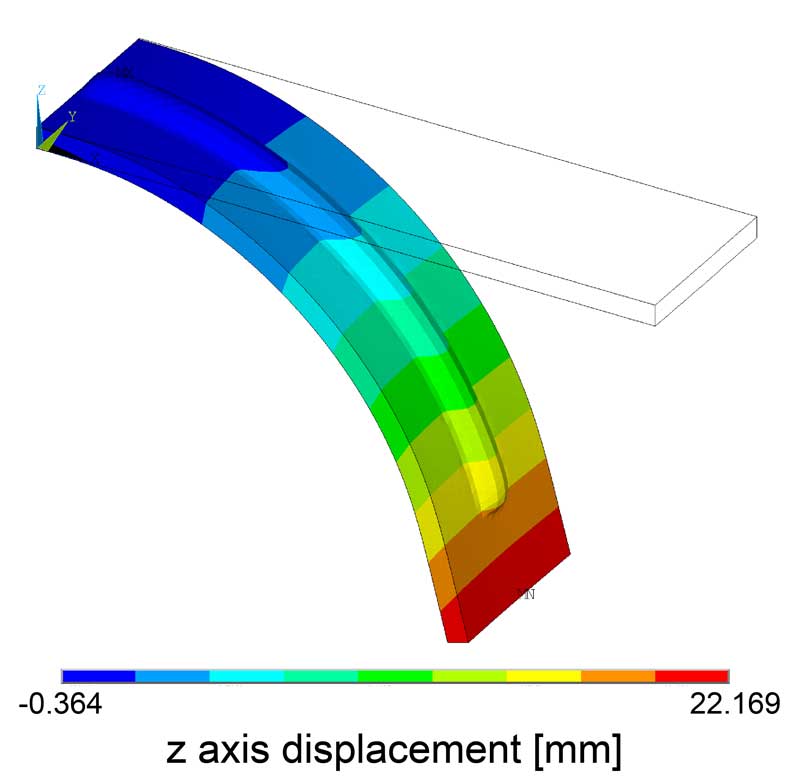
マイクロハイドロ-リックアクチュエータの動作をシミュレートするツールとして、有限要素法を用いた汎用構造解析シミュレーションソフトウェアANSYSを用いている。まず、もっとも単純な構造を持つマイクロハイドロ-リックアクチュエータの動作を解析した。PDMSで作製されたマイクロハイドローリックアクチュエータは超弾性変形を示すため、解析モデルとして超弾性モデルを用いている。さらに、材料として用いたPDMS試験片の二軸引張試験を事前に行い、PDMSの材料特性として応力-歪み線図を取得し、その応力-歪みデータに基づいて解析を行うことで、より現実に近い動作を再現している。その結果、実際に試作したアクチュエータによる実証実験と同様の動作、および同程度の変位を再現することに成功した。
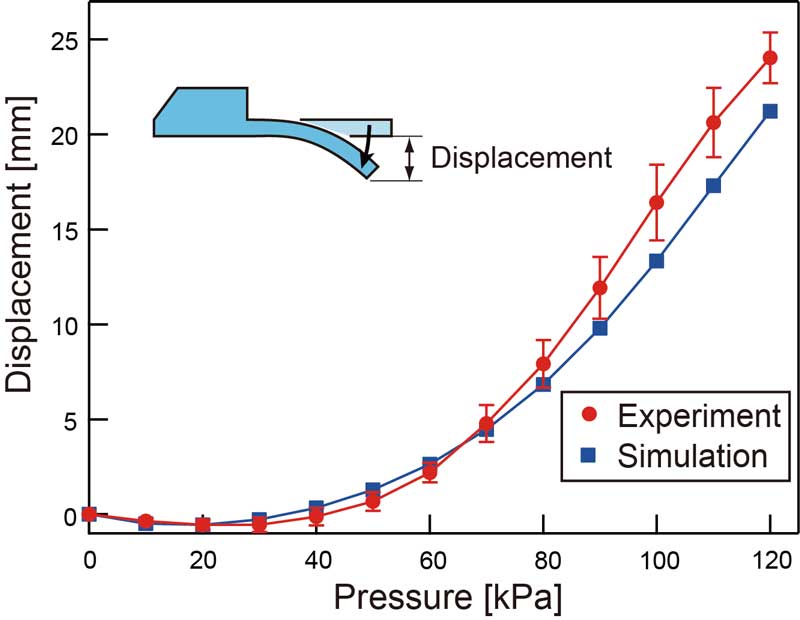 圧力印加時の先端部分の変位の関係
圧力印加時の先端部分の変位の関係
共同研究
- 大島研究室(東大生研)
- 住友ゴム工業(株)
研究予算
- (一財)生産技術奨励会
- 住友ゴム工業(株)
- 日本学術振興会 科研費