概要
さまざまな流体圧力駆動式ソフトアクチュエータが開発されているが、それらの駆動にはガスボンベやコンプレッサーなどの大型圧力源が必要であり、それがシステムの小型化やスタンドアローン化を阻む大きな要因となっている。そこで、それらの小型化やスタンドアローン化を目指し,アクチュエータ本体に小型圧力源を内蔵した「マイクロハイドローリックアクチュエータ」の開発に取り組んでいる。マイクロハイドローリックアクチュエータでは、2次元的なパターンを持つ微細流路構造に内蔵圧力源で生成した圧力を加えることで、柔軟素材でできたアクチュエータを変形させて3次元的な動きを作り出す。まず、直線流路構造と短冊形状、さらに圧力源として小型の電気浸透流ポンプ(EOP)を持つ最も単純なシリコーンゴム製のマイクロハイドローリックアクチュエータを設計・製作した。実際にEOPに電圧を印可すると、流路内の圧力が上昇し、柔軟なアクチュエータ本体が変形し、一方向へたわむことが実験的に実証された。
マイクロハイドローリックアクチュエータの実証実験の様子(8倍速で再生)。内蔵されたEOPに+55Vを加えると、一定方向へ曲がり、極性を反転さえると元の形状に戻る様子が確認できた。
次に、作製したEOP集積型アクチュエータを複数個組み合わせて、より複雑で機能的な動作の実証を試みた。アクチュエータを2つ並べた並列アクチュエータでは、シートアクチュエータが羽ばたくような動作を実現できた。また、アクチュエータ4つを組み合わせた四足アクチュエータでは、足に見立てた4つの動作部分を同時に屈曲させることで、何かの物体に把持するような動作を実現した。
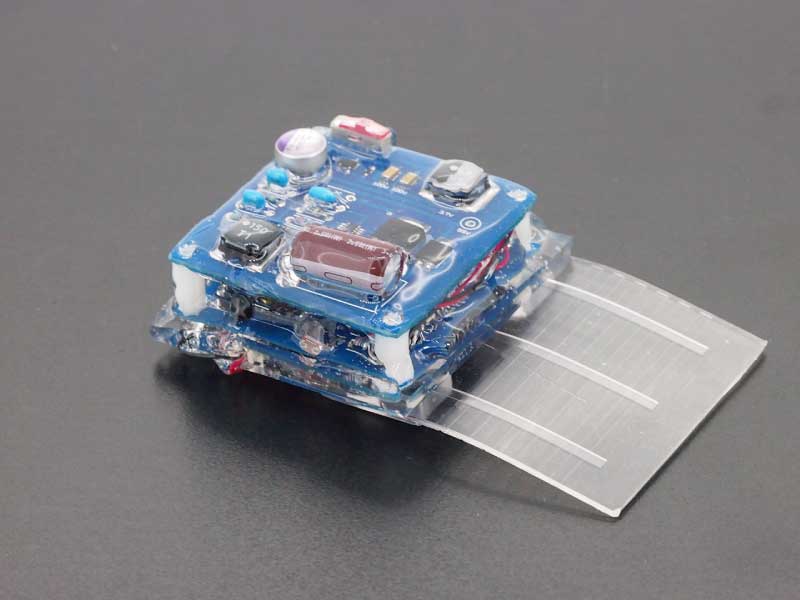 シートアクチュエータ
シートアクチュエータ
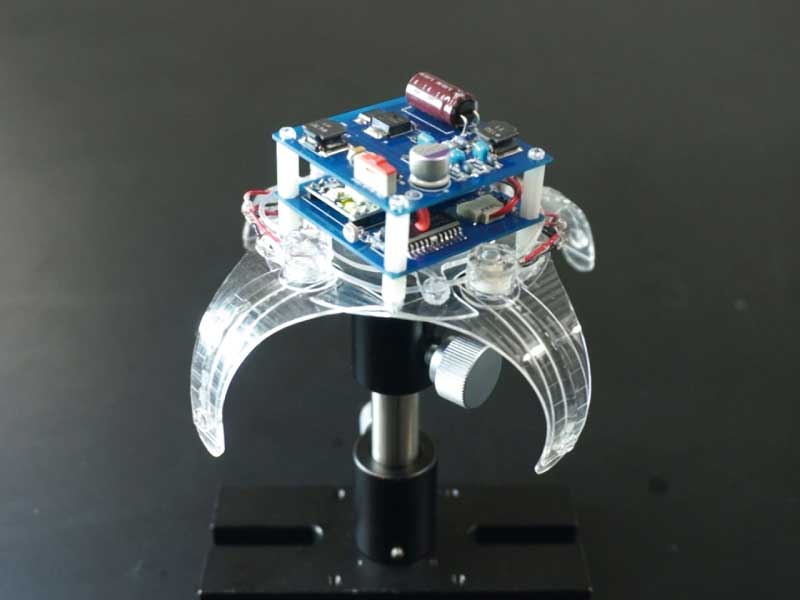 四足アクチュエータ
四足アクチュエータ
共同研究
- 住友ゴム工業株式会社
研究予算
- 日本学術振興会 科研費
- (一財)生産技術奨励会
- 住友ゴム工業株式会社