Abstract
In the field of robotics, there have been proposed many types of hydrodynamically-operated soft actuators which can achieve flexible motion, handle fragile objects, and implement human-friendly interface. Almost all of them require external pressure generators such as a compressor, a compressed gas cylinder or the other pneumatic pump to drive them, which leads to difficulties in miniaturization and total integration. Our research group is focusing on the miniaturization and integration of the components making up soft actuating system, such as hydraulic paths, hydraulic pressure generators and a control unit including a power source to drive those pressure generators.
Recently, we have developed a prototype of a fundamental hydrodynamic soft actuator named a "microhydraulic actuator", which creates a 3D motion from a planar body with 2D fluidic channel patterns and embedded pressure generators. As a first prototype, we designed a simple and fundamental microhydraulic actuator, which has a straight strip-shaped body, a microfluidic channel and a miniaturized electroosmotic pump (EOP). The embedded EOP can generate high pressure enough to drive the actuator with its compact body. The developed actuator was bent to a definite direction as expected by applying a DC voltage to the embedded EOP.
Then, we have designed and demonstrated more functional microhydraulic actuators to show more practical examples. The microhydraulic actuator having two EOP-embedded actuators could deform a sheet like flapping. And, the quadruped actuator which was composed of four actuators with four EOPs could create a motion like clinging to an object.
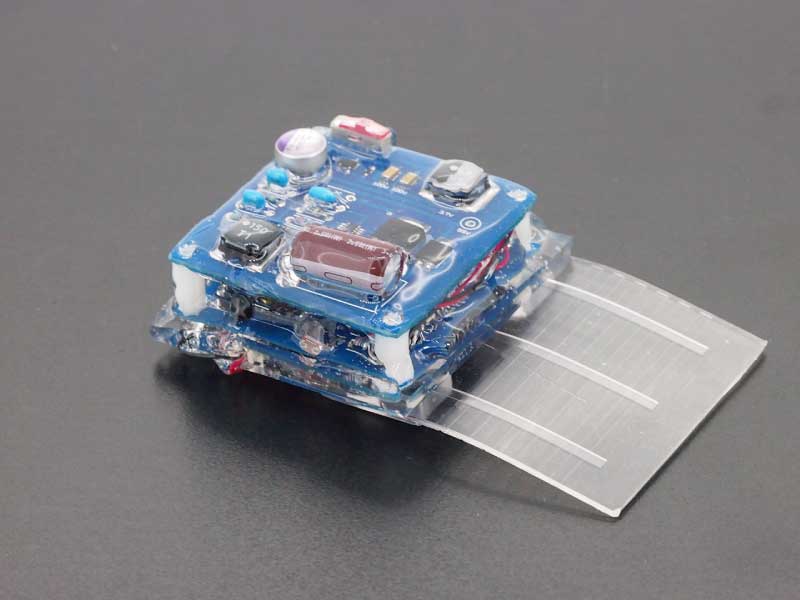 Sheet-type actuator
Sheet-type actuator
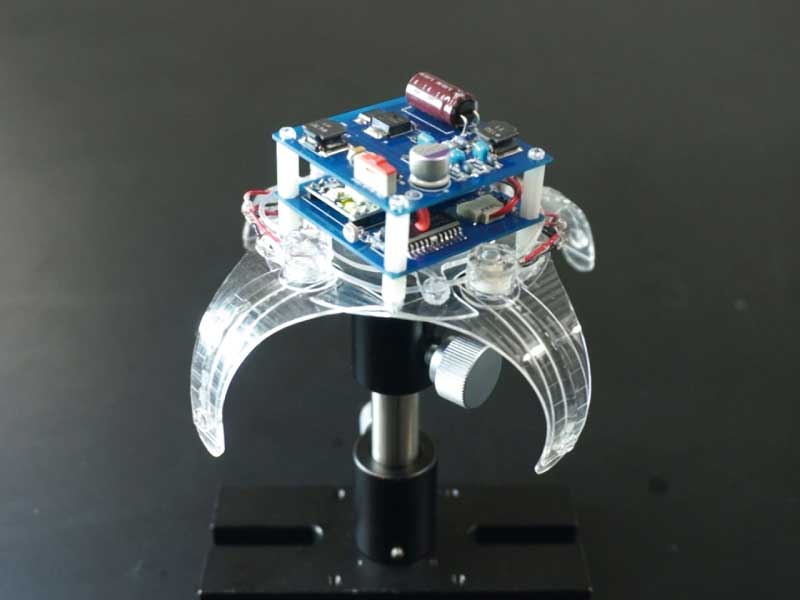 Four-leg actuator
Four-leg actuator
Collaboration
- Sumitomo Rubber Industries, Ltd.
Sponsor
- JSPS KAKENHI
- The Foundation for the Promotion of Industrial Science
- Sumitomo Rubber Industries, Ltd.